
精选百科
本文由作者推荐
基本信息
| 中文名 | 陀螺仪原理 |
| 外文名 | gyroscope |
| 功能 | 导航、定位等系统 |
| 构成 |
现象解释

工作原理
陀螺仪原理
而事实上,静止与运动的陀螺仪本身并无区别,如果静止的陀螺仪本身绝对平衡的话,抛除外在因素陀螺仪是可以不依靠旋转便能立定的。
而如果陀螺仪本身尺寸不平衡的话,在静止下就会造成陀螺仪模型倾斜跌倒,因此不均衡的陀螺仪必然依靠旋转来维持平衡。
陀螺仪本身与引力有关,因为引力的影响,不均衡的陀螺仪,重的一端将向下运行,而轻的一端向上。
在引力场中,重物下降的速度是需要时间的,物体坠落的速度远远慢于陀螺仪本身旋转的速度时,将导致陀螺仪偏重点,在旋转中不断的改变陀螺仪自身的平衡,并形成一个向上旋转的速度方向。
当然,如果陀螺仪偏重点太大,陀螺仪自身的左右互作用力也将失效!。
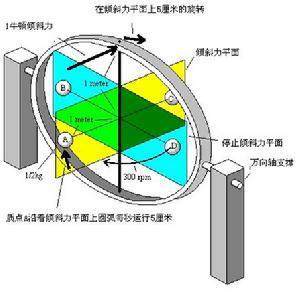
而在旋转中,陀螺仪如果遇到外力导致,陀螺仪转轮某点受力。陀螺仪会立刻倾斜,而陀螺仪受力点的势能如果低于陀螺仪旋转时速,这时受力点,会因为陀螺仪倾斜,在旋转的推动下,陀螺仪受力点将从斜下角,滑向斜上角。而在向斜上角运行时,陀螺仪受力点的势能还在向下运行。这就导致陀螺仪到达斜上角时,受力点的剩余势能将会将在位于斜上角时,势能向下推动。
而与受力点相反的直径另一端,同样具备了相应的势能,这个势能与受力点运动方向相反,受力点向下,而它向上,且管这个点叫“联动受力点”。
当联动受力点旋转180度,从斜上角到达斜下角,这时联动受力点,将陀螺仪向上拉动。
在受力点与联动受力互作用力下,陀螺仪回归平衡。
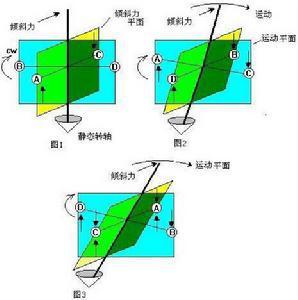
〖专业解释〗我们不用一个完整的轮框,我们用四个质点ABCD来表示边上的区域,这个边对于用图来解释陀螺仪的工作原理是很重要的。轴的底部被托住静止但是能够各个方向旋转。当一个倾斜力作用在顶部的轴上的时候,质点A向上运动,质点C则向下运动,如其中的子图1。因为陀螺仪是顺时针旋转,在旋转90度角之后,质点A将会到达质点B的位置。CD两个质点的情况也是一样的。子图2中质点A当处于如图的90度位置的时候会继续向上运动,质点C也继续向下。AC质点的组合将导致轴在子图2所示的运动平面内运动。一个陀螺仪的轴在一个合适的角度上旋转,在这种情况下,如果陀螺仪逆时针旋转,轴将会在运动平面上向左运动。如果在顺时针的情况中,倾斜力是一个推力而不是拉力的话,运动将会向左发生。在子图3中,当陀螺仪旋转了另一个90度的时候,质点C在质点A受力之前的位置。C质点的向下运动受到了倾斜力的阻碍并且轴不能在倾斜力平面上运动。倾斜力推轴的力量越大,当边缘旋转大约180度时,另一侧的边缘推动轴向回运动。
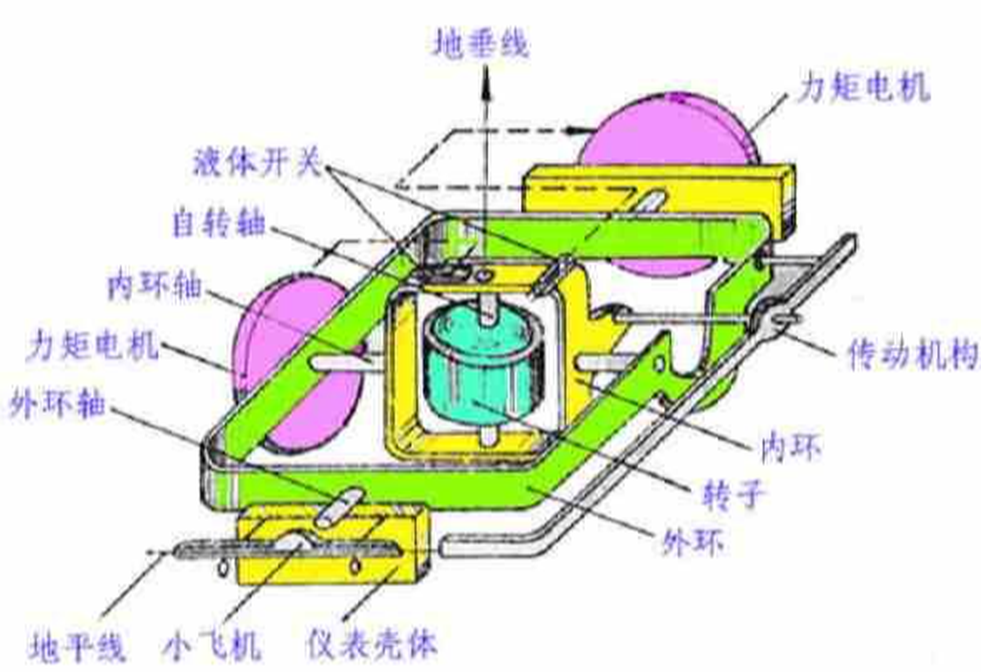
万向节陀螺仪
陀螺仪原理
各模上的陀螺仪
应用实例
隧道中心线测量

陀螺仪原理
当有通视障碍,不能从已知点取得方向角时,可以采用天文测量或陀螺经纬仪测量的方法获取方向角(根据建设省测量规范)。与天文测量比较,陀螺经纬仪测量的方法有很多优越性:对天气的依赖少、云的多少无关、无须复杂的天文计算、在现场可以得到任意测线的方向角而容易计算闭合差。
日影计算所需的真北测定
在城市或近郊地区对高层建筑有日照或日影条件的高度限制。在建筑申请时,要附加日影图。此日影图是指,在冬至的真太阳时的8点到16点为基准,进行为了计算、图面绘制所需要的高精度真北方向测定。使用陀螺经纬仪测量可以获得不受天气、时间影响的真北测量。
智能手机应用
1、陀螺仪自被发明开始,就用于导航,先是德国人将其应用在V1、V2火箭上,因此,如果配合GPS,手机的导航能力将达到前所未有的水准。实际上,很多专业手持式GPS上也装了陀螺仪,如果手机上安装了相应的软件,导航能力绝不亚于很多船舶、飞机上用的导航仪。还可以实现GPS的惯性导航:当汽车行驶到隧道或城市高大建筑物附近,没有GPS讯号时,可以通过陀螺仪来测量汽车的偏航或直线运动位移,从而继续导航。
2、可以和手机上的摄像头配合使用,比如防抖,在拍照时的维持图像的稳定,防止由于手的抖动对拍照质量的影响。在按下快门时,记录手的抖动动作,将手的抖动反馈给图像处理器,可以让手机捕捉到更清晰稳定的画面。
4、可以用作输入设备,陀螺仪相当于一个立体的鼠标,这个功能和第三大用途中的游戏传感器很类似,甚至可以认为是一种类型。通过小幅度的倾斜,偏转手机,实现菜单,目录的选择和操作的执行。(比如前后倾斜手机,实现通讯录条目的上下滚动;左右倾斜手机,实现浏览页面的左右移动或者页面的放大或缩小。)
参考资料
[1]
工作原理与应用 - 陀螺仪是什么? · 电子发烧友网[引用日期2018-12-10]
相关视频
全部
12万次播放01:24
陀螺仪为什么稳定性好?将它放在棉线上,有趣的科学现象发生了
现象解释
61万次播放04:37
陀螺仪的工作原理是什么?手机中的陀螺仪,是一个微型陀螺吗?
工作原理
219次播放04:35
#陀螺仪在直升机上的应用 #抖音小助手 #热点小助手
应用实例
陀螺仪原理相关的文章

黄玉娟女,香港资深配音演员,1990年加入亚洲电视配音组,2000年任职自由身配音演员,2003年10月转往无线电视配音组。其代表作是《蜡笔小新》的野原新之助和《乱马1/2》中的女乱马。其声线多变,从少年少女至老太婆均能出色演绎。现为日本演员天海佑希常任配音演员。
拜什艾日克镇位于阿瓦提县北部,距县城18千米,地形狭长,东西宽18千米,南北长27千米,东临阿克苏东大河,与阿克苏市的哈拉塔镇隔河相望,西靠塔木托拉克镇,南接恒丰公司和巴格托拉克镇,北与阿克苏市的库木巴什乡接壤。
脑出血原发性非外伤性脑实质内出血脑出血是指原发性非外伤性脑实质内出血,也称自发性脑出血。最常见的病因是高血压合并细、小动脉硬化,其他病因包括脑动静脉畸形、动脉瘤、血液病、梗死后出血、脑淀粉样血管病、烟雾病、脑动脉炎、抗凝或溶栓治疗、瘤卒中等。脑出血常见于50岁以上病人,男性稍多于女性,寒冷季节发病率较高。一般无前驱症状,多在活动中或情绪激动时突然起病,发病后症状在数分钟至数小时内达到高峰。血压常明

尚可名片
这家伙太懒了,什么都没写!
作者


