精选百科
本文由作者推荐
神舟飞船
中国自行研制的宇宙飞船
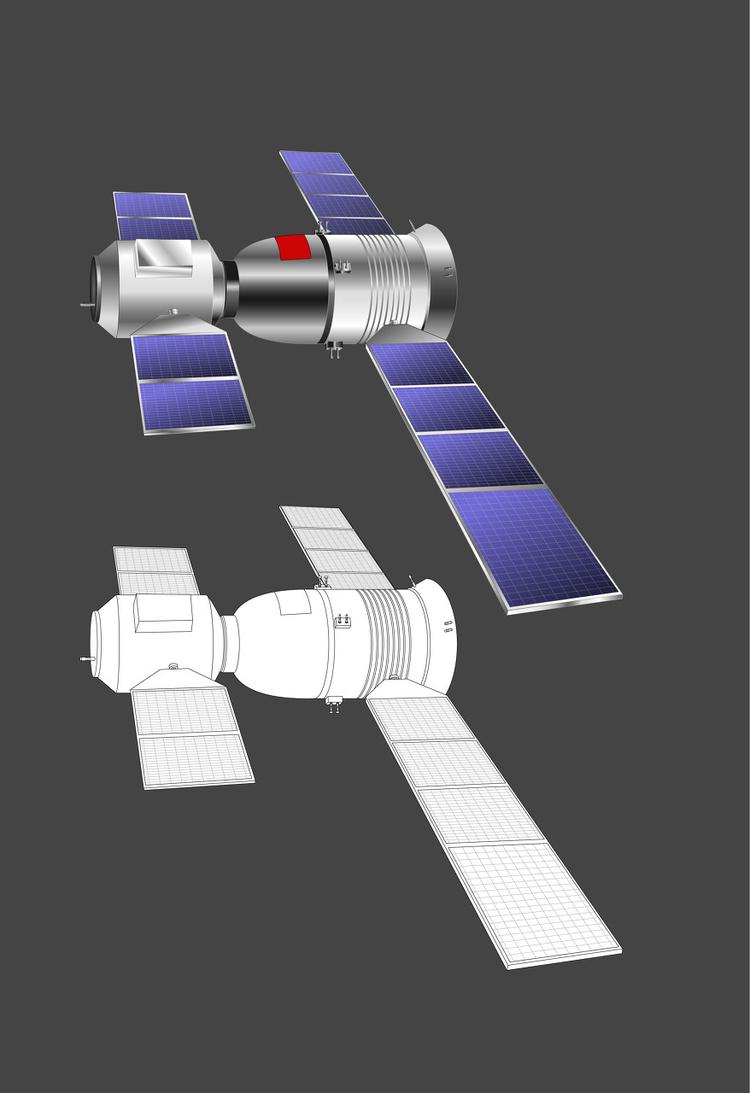
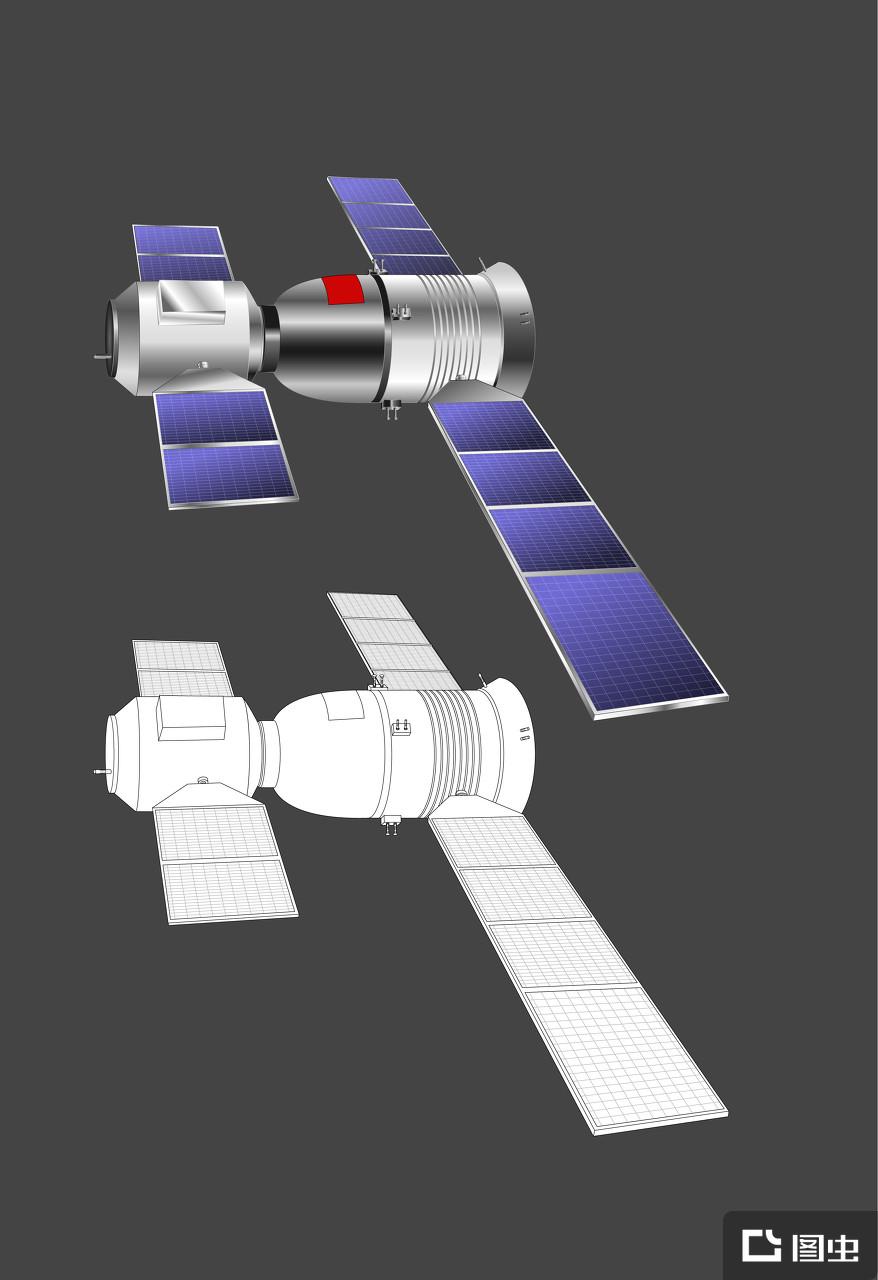
神舟飞船示意图
神舟飞船(英文名Shenzhou spaceship),又称“神舟”载人飞船、神舟号载人飞船,是由中国自行研制的用于天地往返运输人员和物资的载人航天器。飞船可一船多用,既可留轨观测又可作为交会对接飞行器,满足天地往返的需求。
基本信息
中文名
神舟飞船
英文名
Shenzhou spaceship
别名
神舟号载人飞船、“神舟”载人飞船
所属国家
中国
运用领域
载人航天
研发机构
中国空间技术研究院
首发时间
1999/11/20
首发地点
酒泉卫星发射中心
降落地点
内蒙古四子王旗着陆场、东风着陆场
搭载航天员数量
最多3人
飞船由轨道舱、返回舱、推进舱和附加段组成。轨道舱是航天员生活和工作的地方。返回舱是飞船的指挥控制中心,航天员乘坐其上天和返回地面。推进舱也称动力舱,为飞船在轨飞行和返回地面提供能源和动力。附加段曾用于安装专用的空间科学和技术试验设备,现作为交会对接机构的安装部位。
神舟一号到六号飞船总长均约8m,最大直径处2.8m,入轨质量不大于8800kg。
发展历史
背景
“神舟”号载人飞船的研制始于20世纪90年代初期。1992年9月,中央决策实施载人航天工程,并确定了中国载人航天“三步走”的发展战略。第一步,发射载人飞船,建成初步配套的试验性载人飞船工程,开展空间应用实验;第二步,突破航天员出舱活动技术、空间飞行器交会对接技术,发射空间实验室,解决有一定规模的、短期有人照料的空间应用问题;第三步,建造空间站,解决有较大规模的、长期有人照料的空间应用问题。同年,中国航天科技集团公司开始了神舟飞船的研制工作。
技术、经济可行性论证阶段(1992年1月-1992年9月)
1992年1月8日,中央专门委员会决定开展中国载人飞船工程(代号“921”工程)可行性论证工作,成立了以王永志为组长的中国载人飞船工程技术、经济可行性论证组,该论证组下设载人飞船系统论证组,由戚发轫任组长,张国富、范剑峰任副组长。
1992年6月6日编写完成了《“921”工程技术、经济可行性论证报告·载人飞船系统》并得到批准。载人飞船系统的13个分系统也完成了相关的分系统可行性论证报告和多项专题报告,作为主报告的支撑性报告。在1992年6月25-30日召开的“921”工程可行性方案评审会上,报告经过专家评审通过,后经航空航天工业部上报国防科工委。
技术、经济可行性方案复审阶段(1992年10月-1993年4月)
1992年9月21日,中共中央政治局常委会议批准了中国载人航天工程立项实施。10月6日,北京空间飞行器总体设计部成立了载人飞船总体设计室,负责载人飞船系统总体设计工作。11月,任命了载人飞船系统的“两总”。
鉴于载人飞船系统总体和某些分系统在承担单位和队伍上存在较大变动,中国空间技术研究院决定在开展方案论证之前,开展飞船总体及分系统可行性方案的复审。并在1993年3月29日完成了《载人飞船可行性方案复审报告》。
通过复审,确认了载人飞船系统可行性论证提出的总体方案可行,对一些分系统的某些技术方案做了优化。
方案论证阶段(1993年4月-1993年12月)
1993年4月,载人飞船系统方案论证工作开始。在方案论证阶段,为优化总体设计,根据不同阶段的飞行任务,研究确定了载人飞船有“飞船的标准状态”(作为天地往返运输状态)、“飞船的留轨利用作为交会对接目标状态”和“飞船初期试验状态”3种技术状态。对每一种状态都进行了分析和设计,载人飞船系统所属的13个分系统也完成了各自的方案论证。
1993年12月,《载人飞船工程载人飞船系统总体方案论证报告》通过评审后上报,1994年4月14日国防科工委就此报告对中国航天工业总公司作了批复。
方案设计阶段(1994年1月-1995年6月)
在方案设计阶段,总体及各个分系统完成了“神舟号”载人飞船方案设计,提出了具有中国特色的轨道舱留轨方案,学习国外经验并进行技术创新确定了逃逸救生方案,结合实际情况进行创新确定了降落伞方案,综合各方要求和约束确定了返回舱构型和布局。确定了飞船系统的状态和各级技术要求。完成了系统级和分系统级关键技术的攻关,关键技术攻关总结报告通过了上级审查。
在此基础上,于1995年6月编写完成了《载人飞船工程载人飞船系统总体方案设计报告》,评审通过后上报,1995年12月8日国防科工委就此报告对中国航天工业总公司作了批复。
载人飞船系统总体经过多方案综合比较确定了三舱方案,提出了具有中国特色的轨道舱留轨方案,学习国外经验并进行技术创新确定了逃逸救生方案,结合实际情况进行创新确定了降落伞方案,综合各方要求和约束确定了返回舱构型和布局。
测试与任务阶段
从1999年开始,神舟飞船开始执行航天飞行任务,在1999年11月,2001年1月,2002年3月、12月,分别进行了神舟一号至四号的无人及搭载模拟人测试。2003年10月15日,神舟五号搭载航天员杨利伟成功执行飞行任务,此后,神舟飞船正式执行载人航天飞行任务。
系统组成
从系统上划分,神舟系列飞船由结构与机构、制导导航与控制、热控、电源、测控与通信、数据管理、着陆回收、环境控制与生命保障、推进、仪表照明、应急救生、乘员、有效载荷共13个分系统组成。
结构组成
从结构上划分,神舟飞船采用的是轨道舱、返回舱、推进舱组成的,返回舱居中的三舱方案。采用返回舱居中的三舱方案,是因为该方案中返回舱最大直径大,不仅解决了同类型载人飞船乘坐3名航天员过于拥挤的问题,同时增大了返回舱的升阻比,使航天员返回舱的再入过载峰值限制在3~4gn。
总体参数
早期型号的“神舟”载人飞船三舱总长8m,圆柱段直径2.5m,锥段最大直径2.8m,总质量为7755kg,返回舱采用普通圆伞和着陆缓冲发动机陆地软着陆,主伞面积1200m,着陆速度不大于3.5m/s。后期型号根据任务不同,参数有所调整。
轨道舱
神舟号载人飞船的轨道舱为圆柱形,长2.8m,直径2.2m。其两侧安装了太阳帆板,每块帆板面积为2.0m×3.4m,用于轨道舱在独自飞行的阶段获取电力,可提供0.5kW以上的电力。轨道舱尾部配备4组小型推进发动机,每组4个,以提供辅助推力和轨道舱分离后维持轨道运动的能力。轨道舱一侧靠近返回舱部分设有一个直径仅65cm的圆形舱门,提供航天员进出轨道舱的通道,该舱门上方设有轨道舱的观察窗。轨道舱内为航天员的工作和生活场所,备有生活装置如食物、饮水、大小便收集器等,并设有仪器设备,可进行空间应用和科学实验。经论证,在轨道舱上安装一对较小的太阳帆板,并在舱内配以相应的镉镍蓄电池。轨道舱上采用动量轮控制方法,以减小姿态控制推进剂的消耗量,同时在舱体配置有推进子系统和相应的其他设备,这样轨道舱可留轨工作半年左右,并为有效载荷提供2m、300kg的实验能力。
返回舱
神舟号载人飞船的返回舱采用类“联盟号”返回舱的钟形气动外形,并在两个伞舱盖上各加一个耳片,以消除返回舱再入大气层中的第二配平点。长2.0m,直径2.4m(不包括防热层),内部设有舱门与轨道舱相连,内部设有最多3个斜躺式座椅,中间座椅椅背与返回舱的纵轴呈70°夹角布置,供航天员在起飞、升空和返回阶段乘坐。座椅前下方是仪表板、手控操纵手柄和光学瞄准镜等设备,以显示飞船上各个系统机器设备的状态,航天员可通过这些仪表进行监视和控制。返回舱和轨道舱均为密闭的舱段,内置环境控制和生命保障系统,以确保舱内充满1大气压力的氧氮混合气体,并将温度和湿度调节到适宜的范围,以确保航天员在整个飞行任务过程中的生命安全。
此外,返回舱内还安装有主、备两具降落伞用于着陆。主份伞伞舱及备份伞伞舱分别布置在中间座椅上航天员头顶的侧上方的返回舱侧壁上,并采用普通伞方案。返回舱的侧壁上设有两个圆形窗口,一个用于航天员观测窗外的情景,另一个供航天员操作光学瞄准镜观测地面驾驶飞船。返回舱底座为金属架层密封结构,上面安装有返回舱的仪器设备,该底座重量轻便,且十分坚固,在返回舱返回地面进入大气层时,保护返回舱不被炙热的大气烧毁。
推进舱
神舟号载人飞船的推进舱,亦称作设备舱,采用圆柱形设计,内部集成推进系统的发动机和推进剂,为飞船提供调整姿态、轨道以及制动减速等所需动力,同时也装备有电源、环境控制和通信等部分系统设备。两侧各装有一对太阳帆板,每块帆板面积为2.0m×7.5m。该太阳帆板与前方轨道舱上的帆板相结合,使“神舟”载人飞船的总电力输出在平均1.5kW以上。这些太阳帆板可以绕与舱体的连接点旋转,使其在飞船移动时保持最佳方向,获得最大电力,无需飞船本身进行大量的机动以朝向太阳,从而保证太阳帆板对日定向的同时进行飞船对地的不间断观测。推进舱的尾部为飞船的推进系统,由四个大型主发动机组成,分布于推进舱底部正中。在推进舱侧壁内部四周,布置了四对小型纠正姿态用的推进器。此外,推进舱侧壁外还配备了辅助小型推进器。
附加段
附加段又被称为过渡段,其通常不单独成为一个舱体。在工程设计之初,附加段是为将来与另一艘飞船或空间站交会对接做准备用的。在载人飞行及交会对接前,也可以安装各种仪器用于空间探测。从神舟八号飞行任务起,为神舟号载人飞船提供了交会对接功能。
飞行任务
发射记录
任务编号 | 发射时间 | 使用火箭型号 | 发射地点 | 返回时间 | 乘组 | 飞行时间 | 绕地圈数 | 着陆场 |
神舟一号 | 1999/11/20 6:30 | 长征二号F遥一火箭 | 酒泉卫星发射中心 | 1999/11/21 3:41 | 无人 | 21小时11分 | 14 | 内蒙古四子王旗主着陆场 |
神舟二号 | 2001/1/10 1:00 | 长征二号F遥二火箭 | 2001/1/16 19:22 | 6天18小时22分 | 108 | |||
神舟三号 | 2002/3/25 22:15 | 长征二号F遥三火箭 | 2002/4/1 16:54 | 模拟人 | 6天18小时39分 | 108 | ||
神舟四号 | 2002/12/30 0:40 | 长征二号F遥四火箭 | 2003/1/5 19:16 | 6天18小时36分 | 108 | |||
神舟五号 | 2003/10/15 9:00 | 长征二号F遥五火箭 | 2003/10/16 6:28 | 杨利伟 | 21小时28分 | 14 | ||
神舟六号 | 2005/10/12 9:00 | 长征二号F遥六火箭 | 2005/10/17 4:32 | 费俊龙、聂海胜 | 4天19时32分 | 77 | ||
神舟七号 | 2008/9/25 21:10 | 长征二号F遥七火箭 | 2008/9/28 17:37 | 翟志刚、刘伯明、景海鹏 | 2天20小时30分 | 45 | ||
神舟八号 | 2011/11/1 5:58 | 长征二号F遥八火箭 | 2011/11/17 19:32 | 模拟人 | 18天 | 249 | ||
神舟九号 | 2012/6/16 18:37 | 长征二号F遥九火箭 | 2012/6/29 10:03 | 景海鹏、刘旺、刘洋 | 12天 | - | ||
神舟十号 | 2013/6/11 17:38 | 长征二号F遥十火箭 | 2013/6/26 8:07 | 聂海胜、张晓光、王亚平 | 15天 | - | ||
神舟十一号 | 2016/10/17 7:30 | 长征二号F遥十一火箭 | 2016/11/18 13:33 | 景海鹏、陈冬 | 32天 | - | ||
神舟十二号 | 2021/6/17 9:22 | 长征二号F遥十二火箭 | 2021/9/17 13:34 | 聂海胜、刘伯明、汤洪波 | 93天 | - | 东风着陆场 | |
神舟十三号 | 2021/10/16 0:23 | 长征二号F遥十三火箭 | 2022/4/16 9:56 | 翟志刚、王亚平、叶光富 | 183天 | - | ||
神舟十四号 | 2022/6/5 10:44 | 长征二号F遥十四火箭 | 2022/12/4 20:09 | 陈冬、刘洋、蔡旭哲 | 183天 | - | ||
神舟十五号 | 2022/11/29 23:08 | 长征二号F遥十五火箭 | 费俊龙、邓清明、张陆 | 飞行中(截至2023年3月2日) | - | - |
任务详情
神舟一号
1999年11月21日凌晨3时41分,神舟一号飞船顺利降落在内蒙古中部地区的着陆场。飞船在太空中共飞行了21个小时。
这次发射首次采用了在技术厂房对飞船、火箭联合体垂直总装与测试,整体垂直运输至发射场,进行远距离测试发射控制的新模式。首次投入使用了在原有的航天测控网基础上新建的陆海基航天测控网。飞船在轨运行期间,地面测控系统和分布于公海的4艘远望号测量船对其进行了跟踪与测控,成功进行了一系列科学试验。
神舟一号试验飞船的成功发射与回收,标志着中国载人航天技术获得了新的重大突破。
神舟二号
2001年1月10时零分,神舟二号无人飞船在酒泉卫星发射中心由长征二号F遥二火箭发射升空。这是中国载人工程第二次飞行试验,神舟二号飞船是第一艘正样无人飞船。与神舟一号试验飞船相比,神舟二号飞船扩展了现有系统结构,提高了技术性能,飞船技术状态与载人飞船基本一致。
飞行期间,进行了空间生命科学、空间材料、空间天文和物理、微重力科学等领域的实验。
2001年1月16日19时22分,神舟二号无人飞船在内蒙古四子王旗着陆场着陆。
神舟二号标志着中国载人航天工程技术日臻成熟,为最终实现载人飞行奠定了坚实基础。
神舟三号
2002年3月25号22时15分,神舟三号无人飞船在酒泉卫星发射中心由长征二号F遥三火箭发射升空,并成功进入预定轨道。神舟三号是一艘正样无人飞船,飞船技术状态与载人状态完全一致。与第二次飞行试验相比,主要是增加了逃逸和应急救生功能:飞船具备待发段和上升段应急救生功能,完善了备份伞子系统;运载火箭具备了故障检测和逃逸功能,控制分系统采用了冗余技术。神舟三号飞船上装有具备人体代谢模拟装置、拟人生理信号设备的形体假人,能够定量模拟航天员在太空中的重要生理活动参数。飞船在轨运行7天,各系统工作正常,运行状态良好,完成了预定的全部科学实验和探测任务。
神舟三号任务成功标志着中国载人航天工程取得了新的重要进展。
神舟四号
神舟四号飞船于2002年12月30日凌晨在酒泉卫星发射中心由长征二号F遥四火箭发射升空,并成功进入预定轨道。神舟四号是中国载人航天工程第三艘正样无人飞船,除没有载人外,技术状态与载人飞船完全一致。
其按预定计划在太空飞行了6天零18小时,环绕地球108圈。飞船在轨运行期间,北京航天飞行控制中心统一调度分布在三大洋的四艘“远望”号航天测量船及各有关地面测控站,对飞船进行了持续跟踪、测量与控制。飞船在太空成功地实施了太阳能帆板展开、轨道机动、姿态确定等数百个动作,成功实施变轨,并进行了两次轨道维持。载人航天应用系统、航天员系统、飞船环境控制与生命保障分系统在飞行过程中全面参加了试验,先后在太空进行了对地观测、材料科学、生命科学试验及空间天文和空间环境探测等研究项目;预备航天员在发射前也进入飞船进行了实际体验。
2003年1月5日19时16分,神舟四号飞船在完成预定空间科学和技术试验任务后,在内蒙古四子王旗着陆场着陆。
神舟四号飞船的成功发射和返回,表明我国载人航天工程技术日臻成熟,为最终实现载人飞行奠定了坚实基础。
神舟五号
神舟五号载人飞船于2003年10月15日9时在酒泉卫星发射中心由长征二号F遥五火箭发射升空,进入近地点200公里、远地点350公里、倾角42.4°的初始轨道,实施变轨后,进入343公里的圆轨道。神舟五号飞船是中国在无人飞船基础上研制的第一艘载人飞船,乘组为航天员杨利伟。
神舟五号飞船在轨运行时间为21小时23分。在顺利完成各项预定操作任务后,于2003年10月16日6时,在内蒙古四子王旗着陆场着陆。
中国载人航天工程网给予评价:“神舟五号载人航天飞行任务实现了中华民族千年飞天的愿望,是中华民族智慧和精神的高度凝聚,是中国航天事业在新世纪的一座新的里程碑。”
神舟六号
神舟六号载人飞船于2005年10月12日凌晨在酒泉卫星发射中心由长征二号F遥六火箭发射,并进入预定轨道。神舟六号是中国第二艘搭载航天员的飞船,也是中国第一艘执行“多人多天”任务的载人飞船。飞行乘组由2名航天员组成,为费俊龙、聂海胜。
2005年10月17日4时33分,神舟六号返回舱在内蒙古四子王旗主着陆场安全着陆。
神舟七号
此次任务中,航天员翟志刚着中国制“飞天”舱外航天服、刘伯明着俄罗斯制“海鹰”舱外航天服,互相配合,完成了空间出舱活动,航天员翟志刚在舱外取回了科学试验材料并进行了太空行走。出舱活动结束后,释放了伴飞卫星,并绕轨道舱进行伴飞试验。飞船在轨期间,还成功进行了“天链一号”卫星数据中继试验。
神舟七号飞船共在轨飞行2天20小时27分,绕地球飞行45圈后,于2008年9月28日17时37分于内蒙古四子王旗主着陆场安全着陆。
任务实施过程中,俄方专家对“海鹰”舱外航天服提供了有力的技术支持,中俄两国在此次飞行任务中的成功合作,为双方下一步开展更深入的合作创造了条件。
神舟七号任务后,中国成为世界上第三个独立掌握空间出舱关键技术的国家。
神舟八号
神舟八号飞船于2011年11月1日5时58分在酒泉卫星发射中心新型长征二号F遥八火箭发射。神舟八号飞船增加了微波雷达、激光雷达、CCD敏感器等交会测量设备,以及主动式对接机构,具备自动和手动交会对接与分离功能。
在轨飞行过程中,神舟八号飞船经五次变轨,从初始轨道转移到330km的近圆轨道,在距天宫一号目标飞行器后下方约52km处,与天宫一号目标飞行器建立稳定的空空通信链路,开始自主导航。经约144分钟的自主控制飞行过程,后在15分钟之内完成捕获、缓冲、拉近和锁紧四个过程,最终实现两飞行器刚性连接,形成组合体。
天宫一号与神舟八号的成功交会对接标志着中国空间交会对接技术取得重大突破,是中国载人航天事业发展历程中的重要里程碑。
神舟九号
神舟九号载人飞船于2012年6月16日18时37分在酒泉卫星发射中心由新型长征二号F遥九火箭发射。神舟九号飞船与神舟八号飞船技术状态基本一致,为进一步提高安全性与可靠性,进行了部分技术状态更改。神舟飞行乘组由3名航天员组成,为景海鹏、刘旺、刘洋。
神舟九号飞船入轨后,经地面远距离导引和自主控制飞行,于6月18日14时14分,在距地面高度343km的近圆轨道上,与天宫一号目标飞行器成功实现自动交会对接,形成组合体,18日17时07分,航天员景海鹏首次成功进驻天宫一号,随后,刘旺、刘洋依次进驻。
2012年6月29日9时17分,飞船进入返回程序,于10时03分准确降落在预定区域。天宫一号目标飞行器抬高运行轨道,最终进入高度约370km的长期运行轨道。
神舟九号任务圆满成功标志着中国载人航天工程第二步任务取得了重大成果,为今后的载人航天的发展、空间站的建设奠定了良好的基础。
神舟十号
神舟十号载人飞船于2013年6月11日17时38分,在酒泉卫星发射中心由长征二号F遥十火箭发射。神舟十号飞船与神舟九号飞船技术状态基本一致,为进一步提高安全性与可靠性,进行了部分技术状态更改。飞行乘组由3名航天员组成,为聂海胜、张晓光、王亚平;飞船在轨飞行10余天,飞船与天宫一号进行了两次交会对接,第一次为自动交会对接,第二次由航天员手动控制完成。
6月26日7时19分,飞船进入返回程序,返回舱于8时07分准确降落在预定区域。同时,天宫一号已恢复至长期运行轨道。
神舟十号任务实现了中国载人航天飞行任务的连战连捷,为工程第二步第一阶段任务划上了圆满的句号,也为后续载人航天空间站的建设奠定了良好的基础。
神舟十一号
神舟十一号载人飞船由长征二号F遥十一火箭于2016年10月17日7时30分在酒泉卫星发射中心发射,飞行乘组由2名航天员组成,分别是景海鹏、陈冬。飞船入轨后后与天宫二号对接形成组合体,进行了为期30天的驻留,完成了一系列空间科学实验和技术试验。神舟十一号飞船与神舟十号飞船技术状态基本一致,根据任务和产品研制需要,进行了部分技术状态更改。
11月17日12时41分,神舟十一号与天宫二号实施分离。尔后,开展了快速变轨控制验证试验。11月18日13时11分,飞船进入返回程序,13时59分,返回舱顺利降落主着陆场。同时,天宫二号转入独立运行状态,继续开展空间应用和科学实验。
神舟十二号
神舟十二号载人飞船由长征二号F遥十二运载火箭于2021年6月17日9时22分从酒泉卫星发射中心发射升空,飞行乘组由3名航天员组成,为聂海胜、刘伯明、汤洪波。飞船入轨后与天和核心舱对接形成组合体,3名航天员进驻核心舱,进行了为期3个月的驻留,在轨飞行期间进行了2次航天员出舱活动,开展了一系列空间科学实验和技术试验,在轨验证了航天员长期驻留、再生生保、空间物资补给、出船活动、船外操作、在轨维修等空间站建造和运营关键技术。
2021年9月17日12时43分,北京航天飞行控制中心通过地面测控站发出返回指令,神舟十二号载人飞船轨道舱与返回舱成功分离。此后,飞船返回制动发动机点火,返回舱与推进舱分离。13时34分,神舟十二号载人飞船返回舱在东风着陆场成功着陆,空间站阶段首次载人飞行任务取得圆满成功。此次是东风着陆场首次执行载人飞船搜索回收任务。
神舟十二号载人飞行任务的圆满成功,为后续空间站建造运营奠定了更加坚实的基础。
神舟十三号
神舟十三号载人飞船由长征二号F遥十三运载火箭于2021年10月16日0时23分在酒泉卫星发射中心发射升空,飞行乘组由3名航天员组成,为翟志刚、王亚平、叶光富。飞船入轨后顺利完成入轨状态设置,于北京时间2021年10月16日6时56分,采用自主快速交会对接模式成功对接于天和核心舱径向端口,与此前已对接的天舟二号、天舟三号货运飞船一起构成四舱(船)组合体,整个交会对接过程历时约6.5小时。3名航天员随后将从神舟十三号载人飞船进入天和核心舱。在顺利进驻空间站天和核心舱后,2021年10月17日9时50分,神舟十三号航天员乘组成功开启货物舱舱门,并顺利进入天舟三号货运飞船。按计划,航天员乘组开启了天舟二号货运飞船货物舱舱门,并开展货物转运等相关工作。
2022年4月16日09时06分,北京航天飞行控制中心通过地面测控站发出返回指令,神舟十三号载人飞船轨道舱与返回舱成功分离。此后,飞船返回制动发动机点火,返回舱与推进舱分离。09时56分,神舟十三号载人飞船返回舱在东风着陆场成功着陆。
神舟十四号
神舟十四号载人飞船于2022年6月5日10时44分在酒泉卫星发射中心由长征二号F遥十四运载火箭发射升空,飞行乘组由3名航天员组成,为翟志刚、王亚平、叶光富。约577秒后,神舟十四号载人飞船与火箭成功分离,进入预定轨道,飞船入轨后,按照预定程序,采用自主快速交会对接模式,经过6次自主变轨,于北京时间2022年6月5日17时42分,成功对接于天和核心舱径向端口,整个对接过程历时约7小时。在神舟十四号载人飞船与空间站组合体成功实现自主快速交会对接后,2022年6月5日20时50分,航天员陈冬、刘洋、蔡旭哲依次全部进入天和核心舱。并按计划开展相关工作。
2022年12月2日晚,神舟十四、神舟十五号航天员乘组进行交接仪式,中国空间站正式开启长期有人驻留模式。
2022年12月4日19时20分,北京航天飞行控制中心通过地面测控站发出返回指令,神舟十四号载人飞船轨道舱与返回舱成功分离。此后,飞船返回制动发动机点火,返回舱与推进舱分离。20时09分,神舟十四号载人飞船返回舱在东风着陆场成功着陆。
神舟十五号
神舟十五号载人飞船于2022年11月29日23时08分在酒泉卫星发射中心由长征二号F遥十五运载火箭发射升空,飞行乘组由3名航天员组成,为费俊龙、邓清明、张陆。约10分钟后,神舟十五号载人飞船与火箭成功分离,进入预定轨道。
2022年11月30日5时42分,神舟十五号载人飞船按照预定程序与空间站组合体进行自主快速交会对接,成功对接于空间站天和核心舱前向端口,整个对接过程历时约6.5小时。
2022年11月30日7时33分,神舟十四号航天员乘组打开舱门,与神舟十五号航天员乘组汇合,并留下合影。
未来规划
神舟十六号载人飞行任务
预定发射时间:2023年5月
预定发射地点:酒泉卫星发射中心
飞行乘组:由3名航天员组成
空间站构型:神舟十六号对接于核心舱径向端口,形成三舱三船组合体。
主要任务:实施航天员出舱活动和货物气闸舱出舱任务;继续开展空间科学实验和技术试验;开展平台管理工作、航天员保障相关工作以及科普教育等重要活动。
神舟十七号载人飞行任务
预定发射时间:2023年10月
预定发射地点:酒泉卫星发射中心
飞行乘组:由3名航天员组成
空间站构型:神舟十七号对接于核心舱前向端口,形成三舱三船组合体。
主要任务:实施航天员出舱活动和货物气闸舱出舱任务;继续开展空间科学实验和技术试验;开展平台管理常规工作、航天员保障相关工作以及科普教育等重要活动。
影响与评价
影响
受中国载人航天工程、神舟飞船的影响,涌现出一批优秀的文艺作品。例如宁海强执导的航天题材电视剧《神舟》,首次披露了大量鲜为人知的航天幕后故事,并邀请杨利伟亲临剧组指导。陈凯歌导演的电影《我和我的祖国》,还原了神舟十一号着陆的场景。
除此之外,好莱坞科幻大片《地心引力》中,宇航员最后搭乘神舟飞船返回地面。
评价
中国载人航天工程办公室,中国载人航天工程网对神舟飞船做出如下评价:
“神舟飞船突破了载人飞船再入升力控制、应急救生、软着陆、GNC故障诊断、舱段间分离、防热等13项关键技术。神舟飞船“三舱一段”的结构与总体方式具有鲜明的中国特色,神舟飞船起点高,一步到位,智能化程度较高。虽然中国载人航天工程起步较晚,却一步迈过美苏的四十年发展历程,实现了跨越式的发展。”
“神舟飞船的起飞质量和座舱最大直径,都远远大于美国“水星”号和苏联“东方”号。神舟飞船的构形比“水星”号和“东方”号的两舱构形具有更多的功能,在舱段间的电、气、液路连接与分离技术等技术方面也更复杂。在电源方面神舟飞船采用了太阳电池阵为主的电源方案,这比“水星”号、“东方”号的电源系统技术上有了很大的进步。尤其是神舟飞船采用了升力式返回再入,由GNC分系统进行再入过程中的升力控制,这是比弹道式再入更为先进的返回方式,可以大大提高飞船返回着陆点的精度和降低再入过载峰值,减轻航天员返回地面时承受过载的痛苦。神舟飞船与20世纪90年代国外的先进载人飞船相比,从再入方式、着陆精度和再入过载峰值等指标上大致与联盟TM飞船相当,并为航天员的工作和生活创造了更为舒适的环境。神舟是中国天地往返运输的优良工具,堪称摆渡天河的真正神舟。”
神舟飞船相关的文章

朝圣者是指参加朝圣的人们。朝圣者都是朝着他们认为的天堂方向朝拜的,一般都是庙宇和高山等。朝圣者目的地一般为耶路撒冷、麦加或西藏(分属世界三大宗教基督教、伊斯兰教、佛教)。朝圣者有不同的信仰,他们的朝圣之路都是通往他们内心认为的最神圣的地方。朝圣者在朝圣途中有五步一拜、十步一跪的礼仪。有不少朝圣者,在
伊朗伊斯法罕三十三孔桥(Allahver dikhan Bridge、Sio Seh Pol Bridge)(波斯语:سی و سه پل,发音[ˈsiː oˈseh ˈpol],)是伊朗伊斯法罕11座桥梁之一。它被高度评价为萨非桥梁设计最著名的代表之一。
西晋(公元265年—公元316年)是中国历史上三国时期之后的大一统王朝之一,另与东晋合称晋朝。传四帝,国祚五十一年。若以灭东吴始,则仅立朝37年。为了区别于东晋,史称西晋,两晋又被称为司马晋。

李伟才李伟才,作曲家,电影《归心似箭》中主题歌《雁南飞》的曲作者。1925年出生,我国著名电影作曲家。代表作品有:《四季美人》《小白龙》《长空比翼》《猎字99号》《小放牛》《永不消逝的电波》《哈尔滨之夜》《林海雪原》《峥嵘岁月》《冲破黎明前的黑暗》《松花江上组曲》《战上海》《秘密图纸》《中国民歌组曲

尚可名片
这家伙太懒了,什么都没写!
作者