
气动执行器是用气压力驱动启闭或调节阀门的执行装置,又被称气动执行机构或气动装置,不过一般通俗的称之为气动头。 气动执行器一般应用于发电厂、化工,炼油等,有扭矩大、空间小、扭矩曲线的有点,有时还配备一定的辅助装置,常用的有阀门定位器和手轮机构。阀门定位器的作用是利用反馈原理来改善执行器的性能,使执行器能按控制器的控制信号,实现准确的定位。手轮机构的作用是当控制系统因停电、停气、控制器无输出或执行机构失灵时,利用它可以直接操纵控制阀,以维持生产的正常进行。
精选百科
本文由作者推荐

气动执行器
用于化工炼油等的设备
工作原理

气动执行器
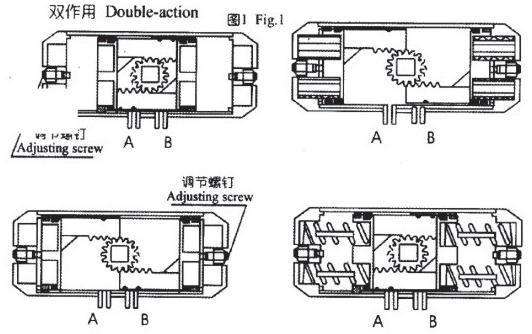
当压缩空气从A管咀进入气动执行器时,气体推动双活塞向两端(缸盖端)直线运动,活塞上的齿条带动旋转轴上的齿轮逆时针方向转动90度,阀门即被打开。此时气动执行阀两端的气体随B管咀排出。反之,当压缩空气从B官咀进入气动执行器的两端时,气体推动双塞向中间直线运动,活塞上的齿条带动旋转轴上的齿轮顺时针方向转动90度,阀门即被关闭。此时气动执行器中间的气体随A管咀排出。以上为标准型的传动原理。根据用户需求,气动执行器可装置成与标准型相反的传动原理,即选准轴顺时针方向转动为开启阀门,逆时针方向转动为关闭阀门。单作用(弹簧复位型)气动执行器A管咀为进气口,B管咀为排气孔(B管咀应安装消声器)。A管咀进气为开启阀门,断气时靠弹簧力关闭阀门。基本构成

内部结构
气动执行器的调节机构的种类和构造大致相同,主要是执行机构不同。因此在气动执行器介绍时分为执行机构和调节阀两部分。气动执行器由执行机构和调节阀(调节机构)两个部分组成。根据控制信号的大小,产生相应的推力,推动调节阀动作。调节阀是气动执行器的调节部分,在执行机构推力的作用下,调节阀产生一定的位移或转角,直接调节流体的流量。1、气动装置主要由气缸、活塞、齿轮轴、端盖、密封件、螺丝等组成;成套气动装置还应该包括开度指示、行程限位、电磁阀、定位器、气动元件、手动机构、信号反馈等部件组成。
2、气动装置与阀门的连接尺寸应符合ISO5211(底部)、 GB/T12222 和 GB/T12223 的规定。
3、带手动机构的气动装置,在气源中断时,应能用其手动机构进行气动球阀的启闭操作,面向手轮时,手轮或手柄应逆时针旋转为阀开,顺时针旋转为阀关。
4、活塞杆端部为内、外螺纹时,应有标准扳手适用的扳手口。
5、活塞的密封圈应便于更换与检修。

气动执行器
6、带缓冲机构的气动装置,其缓冲机构的行程长度可参照《表 1》的规定。7、带可调缓冲机构的气动装置,应有缸体外部调节其缓冲作用的机构。
8、气缸进出气口的螺纹尺寸应符合MANUR NORM(附件标准) sypv,GB/T7306.1、GB/T7306.2 和 GB/T7307 的规定。
性能
1、气动装置额定输出力或力矩应符合 GB/T12222 和 GB/T12223 的规定
2、在空载情况下,对气缸内输入按《表 2》规定的气压,其动作应平稳,无卡阻及爬行现象。
3、在 0.6MPa 的空气压力下,气动装置启、闭两个方向的输出力矩或推力,其值应不小于气动装置标牌所标示的数值,且动作应灵活,不允许各部位出现永久变形及其他异常现象。
4、密封试验用最大工作压力进行试验时,从各自背压一侧泄漏出的空气量不允许超过 (3+0.15D)cm3/min(标准状态);从端盖、输出轴处泄漏出的空气量不允许超过 (3+0.15d)cm3/min。
5、强度试验用 1.5 倍的最大工作压力进行试验,保持试验压力 3min 后,其缸体端盖和静密封部位不允许有渗漏及结构变形。
6、动作寿命次数,气动装置模拟气动阀门动作,在保持两个方向的输出力矩或推力能力的情况下,启闭操作的启闭次数应不低于 50000 次(启—闭循环为一次)。
7、带缓冲机构的气动装置,当活塞运动到行程终端位置时,不允许出现冲击现象。

气动执行器
外观
1、铸造气缸的端盖、端法兰、箱体上不得有划痕、割痕、气孔、毛刺等。
2、气动装置外表面涂漆层或化学处理层应平整、光滑、色泽均匀,无油污、压痕和其他机械损伤。

气动执行器
优势
1、接受连续的气信号,输出直线位移(加电/气转换装置后,也可以接受连续的电信号),有的配上摇臂后,可输出角位移。
气动执行器
2、有正、反作用功能。
3、移动速度大,但负载增加时速度会变慢。
4、输出力与操作压力有关。
5、可靠性高,但气源中断后阀门不能保持(加保位阀后可以保持)。
6、不便实现分段控制和程序控制。
7、检修维护简单,对环境的适应性好。
8、输出功率较大。
9、具有防爆功能。
紧凑的双活塞齿轮,齿条式结构,啮合精确,效率高,输出扭矩恒定。
铝制缸体、活塞及端盖,与同规格结构的执行器相比重量最轻。
缸体为挤压铝合金,并经硬质阳极氧化处理,内表面质地坚硬,强度,硬度高。采用低摩擦材料制成的滑动轴承,避免了金属间的相互直接接触,摩擦系数低,转动灵活,使用寿命长。
气动执行器与阀门安装、连接尺寸根据国际标准ISO5211、DIN3337和VDI/VDE3845进行设计,可与普通气动执行器互换。
气源孔符合 NAMUR 标准。
气动执行器底部轴装配孔(符合ISO5211标准)成双四方形,便于带方杆的阀线性或45°转角安装。
输出轴的顶部和顶部的孔符合 NAMUR 标准。
两端的调整螺钉可调整阀门的开启角度。
相同规格的有双作用式、单作用式(弹簧复位)。
可根据阀门需要选择方向,顺时针或逆时针旋转。
根据用户需要安装电磁阀、定位器(开度指示)、回信器、各种限位开关及手动操作装置。
缺点
控制精度较低,双作用的气动执行器,断气源后不能回到预设位置。单作用的气动执行器,断气源后可以依靠弹簧回到预设位置
分类选型
气动执行器
执行器按其能源形式分为气动,电动和液动三大类,它们各有特点,适用于不同的场合。气动执行器是执行器中的一种类别。气动执行器还可以分为单作用和双作用两种类型:执行器的开关动作都通过气源来驱动执行,叫做DOUBLE ACTING (双作用)。SPRING RETURN (单 作用)的开关动作只有开动作是气源驱动,而关动作时弹簧复位。注:本文均以DA/SR系列气动执行机构为例,说明执行机构的选用这个参考资料的目的是帮助客户正确选择执行机构,在把气动/电动执行机构安装到阀门之前,必须考虑以下因素。* 阀门的运行力矩加上生产厂家的推荐的安全系数/根据操作状况。* 执行机构的气源压力或电源电压。* 执行机构的类型双作用或者单作用(弹簧复位)以及一定气源下的输出力矩或额定电压下的输出力矩。* 执行机构的转向以及故障模式(故障开或故障关)正确选择一个执行机构是非常重要的,如执行机构过大,阀杆可能受力过大。相反如执行机构过小,侧不能产生足够的力矩来充分操作阀门。一般地说,我们认为操作阀门所需的力矩来自阀门的金属部件(如球芯,阀瓣)和密封件(阀座)之间的磨擦。根据阀门使用场合,使用温度,操作频率,管道和压差,流动介质(润滑、干燥、泥浆),许多因素均影响操作力矩
球阀的结构原理基本上根据一个抛光球芯(包括通道)包夹在两个阀座这间(上游和下游),球心的旋转对流体进行拦截或流过球芯,上游和下游的压差产生的力使球芯紧靠在下游阀座(浮动球结构)。这种情况下操作阀门的力矩是由球芯与阀座、阀杆与填料相互摩擦所决定的。如图1所示,力矩最大值发生在出现压差且球芯在关闭位置向打开方向旋转时
蝶阀。蝶阀的结构原理基本上根据固定在轴心的蝶板。在关闭位置蝶板与阀座完全密封,当蝶板旋转(绕着阀杆)后与流体的流向平行时,阀门处于全开位置。相反当蝶板与流体的流向垂直时,阀门处于关闭位置。操作蝶阀的力矩是由蝶板与阀座、阀杆与填料之间的磨擦所决定的,同时压差作用在蝶板上的力也影响操作力矩如阀门在关闭时力矩最大,微小地旋转后,力矩将明显减小
旋塞阀的结构原理是基本根据密封在锥形塞体里的塞子。在塞子的一个方向上有一个通道。随着塞子旋入阀座来实现阀门的开启和关闭。操作力矩通常不受流体的压力影响而是由开启和关闭过程中阀座和塞子之间的摩擦所决定的。阀门在关闭时力矩最大。由于有受压力的影响,在余下的操作中始终保持较高的力矩
关联机构
双作用执行机构
双作用执行机构的选用以DA系列气动执行机构为例。齿轮条式执行机构的输出力矩是活塞压力(气源压力所供)乘上节圆半径(力臂)所得,如图4所示。且磨擦阻力小效率高。如图5所示,顺时针旋转和逆时针旋转时输出力矩都是线性的。在正常操作条件下,双作用执行机构的推荐安全系数为25-50%
单作用执行机构
明精单作用执行机构的选用以SR系列气动执行机构为例在弹簧复位的应用中,输出力矩是在两个不同的操作过程中所得,根据行程位置,每一次操作产生两个不同的力矩值。弹簧复位执行机构的输出力矩由力(空气压力或弹簧作用力)乘上力臂所得第一种状况:输出力矩是由空气压力进入中腔压缩弹簧后所得,称为"空气行程输出力矩"在这种情况下,气源压力迫使活塞从0度转向90度位置,由于弹簧压缩产生反作用力,力矩从起点时最大值逐渐递减直至到第二种状况:输出力矩是当中腔失气时弹簧恢复力作用在活塞上所得,称为"弹簧行程输出力矩"在这种情况下,由于弹簧的伸长,输出力矩从90度逐渐递减直0度如以上所述,单作用执行机构是根据在两种状况下产生一个平衡力矩的基础上设计而成的。如图11所示。在每种情况下,通过改变每边弹簧数量和气源压力的关系(如每边2根弹簧和5.5巴气源或反之),有可能获得不平衡力矩 在弹簧复位应用中可获得两种状况:失气开启或失气关闭。在正常工作条件下,弹簧复位执行机构的推荐安全系数为25-50%
弹簧复位执行机构的选用示例(同时见技术数据表):
弹簧关(失气)
*球阀的力矩=80NM
*安全系数(25%)=80NM+25%=100NM
*气源压力=0.6MPa
被选用的SY-SR执行机构是SR125-05,因为可产生下列数值:
*弹簧行程0o=119.2NM
*弹簧行程90o=216.2NM
*空气行程0o=228.7NM
*空气行程90o=118.8NM
比较
从技术性能方面讲,气动执行器的优势主要包括以下4个方面:
(1)负载大,可以适应高力矩输出的应用。
(2)动作迅速、反应快。
(3)工作环境适应性好,特别在易燃、易爆、多尘埃、强磁、辐射和振动等恶劣工作环境中,比液压、电子、电气控制更优越。
(4)行程受阻或阀杆被扎住时电机容易受损。
而电动执行器的优势主要包括:
(1)结构紧凑,体积小巧。比起气动执行器,电动执行器结构相对简单,一个基本的电子系统包括执行器,三位置DPDT开关、熔断器和一些电线,易于装配。
(2)电动执行器的驱动源很灵活,一般车载电源即可满足需要,而气动执行器需要气源和压缩驱动装置。
(3)电动执行器没有“漏气”的危险,可靠性高,而空气的可压缩性使得气动执行器的稳定性稍差。
(4)不需要对各种气动管线进行安装和维护。
(5)可以无需动力即保持负载,而气动执行器需要持续不断的压力供给。
(6)由于不需要额外的压力装置,电动执行器更加安静。通常,如果气动执行器在大负载的情况下,要加装消音器。
(7)在气动装置中的通常需要把电信号转化为气信号,然后再转化为电信号,传递速度较慢,不宜用于元件级数过多的复杂回路。
(8)电动执行器在控制的精度方面更胜一筹。
实际上,气动系统和电动系统并不互相排斥。气动执行器可以简单的实现快速直线循环运动,结构简单,维护便捷,同时可以在各种恶劣工作环境中使用,如有防爆要求、多粉尘或潮湿的工况。但在作用力快速增大且需要精确定位的情况下,带伺服马达的电驱动器具有优势。对于要求精确、同步运转、可调节和规定的定位编程的应用场合,电驱动器是最好的选择,带闭环定位控制器的伺服或步进马达所组成的电驱动系统能够补充气动系统的不足之处。
现代控制中各种系统越来越复杂、越来越精细,并不是某种驱动控制技术就可满足系统的多种控制功能。电动执行器主要用于需要精密控制的应用场合,自动化设备中柔性化要求在不断提升,同一设备往往要求适应不同尺寸工件的加工需要,执行器需要进行多点定位控制,而且要对执行器的运行速度及力矩进行精确控制或同步跟踪,这些利用传统气动控制是无法实现的,而电动执行器就能非常轻松的实现此类控制。由此可见气动执行器比较适用于简单的运动控制,而电执行器则多用于精密运动控制的场合。
气动执行器相关的文章

陈欣健(外文名:Philip Chan),1945年1月25日出生,是中国香港人。中国香港演员、编剧、导演、制片人、主持人。香港电影导演协会永远名誉会长、金像奖副主席、香港影艺人协会名誉理事。在中学时期组建了香港第一支华人校园流行乐队。
法鲁克一世(拉丁文转写:Fārūq),全名穆罕默德·法鲁克(Muhammad Fārūq),第二任埃及和苏丹国王,努比亚、科尔多凡和达尔富尔的统治者(1936年至1952年在任)。
塔里木盆地(英文:Tarim Basin,维吾尔语:تارىم ئويمانلىقى)是中国面积最大的内陆盆地。位于新疆维吾尔自治区南部,西起帕米尔高原东麓,东到罗布泊洼地,南临昆仑山、阿尔金山,北倚天山山脉,东西长1400千米,南北宽约550千米,面积约56万平方千米,大体呈菱形,经纬度范围为34
尼罗河本词条是多义词,共5个义项流经非洲东部与北部的河流尼罗河,全长6670公里,是世界第一长河,非洲主河流之父。发源于东非高原,自南向北注入地中海,是一条国际河流。流经布隆迪、卢旺达、坦桑尼亚、乌干达、埃塞俄比亚、苏丹、埃及等7个国家,跨越世界上面积最大的撒哈拉沙漠。流域面积约335万平方公里,占非洲大陆面积的九分之一,年平均流量每秒3100立方米。尼罗河——阿拉伯语意为“大河”。“尼罗,尼罗,


尚可名片
这家伙太懒了,什么都没写!
作者


