
捷联惯导系统(SINS)是在平台式惯导系统基础上发展而来的,它是一种无框架系统,由三个速率陀螺、三个线加速度计和微型计算机组成。捷联惯导系统和平台式惯导系统一样,能精确地提供载体的姿态、地速、经纬度等导航参数。采用光纤陀螺的捷联惯导系统被认为是一种极有发展前途的导航系统。
精选百科
本文由作者推荐
捷联惯导系统
用于炸弹制导等的导航系统
中文名
捷联惯导系统
外文名
Strapdown inertial navigation system
应用
导弹/炸弹制导
型号
美国战斧巡航导弹
英文简称
SINS
投入时间
1953年
特点
体积小、重量轻、可靠性高等
引言
在军、民领域中的各类飞行器上,惯导系统作为一种现代化导航设备已被广泛应用,尤其在现代军事航空领域中发挥着举足轻重的作用。
早期的惯导系统由于采用了机械式精密稳定平台,被称为平台式惯导系统,它不仅体积大、重量重、可靠性低、维护复杂、费用昂贵,而且系统性能还受到机械结构的复杂性和极限精度的制约。最早的机械式惯导系统是美国麻省理工学院研制的于1953年投于使用的空间稳定惯性基准设备,其直径为1.5m,重量达908kg,系统精度约为0.925km/h。到20世纪70年代,美空军采用了高级惯性基准球用于MX洲际弹道导弹上,将系统的精度提高了一个数量级以上。它代表了机械实现的顶峰,该系统采用了浮球平台结构,直径为0.5m,重量为52kg。
随着计算机和微技术的迅猛发展,利用计算机的强大解算和控制功能代替机电稳定系统成为可能。于是,一种新型惯导系统--捷联惯导系统从20世纪60年代初开始发展起来,尤其在1969年,捷联惯导系统作为"阿波罗"-13号登月飞船的应急备份装置,在其服务舱发生爆炸时将飞船成功地引导到返回地球的轨道上时起到了决定性作用,成为捷联式惯导系统发展中的一个里程碑。
工作原理特点
惯导系统主要分为平台式惯导系统和捷联式惯导系统两大类。惯导系统(INS)是一种不依赖于任何外部信
捷联惯导系统
息、也不向外部辐射能量的自主式导航系统,具有隐蔽性好,可在空中、地面、水下等各种复杂环境下工作的特点。平台式惯导系统和捷联式惯导系统的主要区别是:前者有实体的物理平台,陀螺和加速度计置于陀螺稳定的平台上,该平台跟踪导航坐标系,以实现速度和位置解算,姿态数据直接取自于平台的环架;后者的陀螺和加速度计直接固连在载体上作为测量基准,它不再采用机电平台,惯性平台的功能由计算机完成,即在计算机内建立一个数学平台取代机电平台的功能,其飞行器姿态数据通过计算机计算得到,故有时也称其为"数学平台",这是捷联惯导系统区别于平台式惯导系统的根本点。由于惯性元有固定漂移率,会造成导航误差,因此,远程导弹、飞机等武器平台通常采用指令、GPS或其组合等方式对惯导进行定时修正,以获取持续准确的位置参数。如采用指令+捷联式惯导、GPS+惯导(GPS/INS)。美国的战斧巡航导弹采用了GPS+INS+地形匹配组合导航。
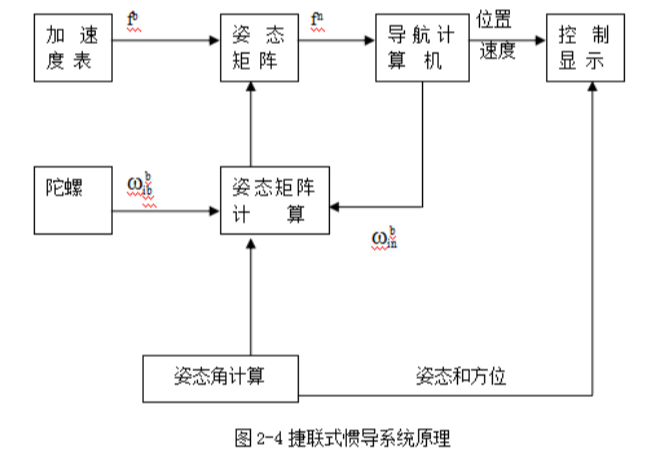
惯导系统基本工作原理是以牛顿力学定律为基础,通过测量载体在惯性参考系的加速度,将它对时间进行积分,之后将其变换到导航坐标系,得到在导航坐标系中的速度、偏航角和位置信息等。对捷联惯导系统而言,平台的作用和概念体现在计算机中,它是写在计算机中的方向余弦阵。直接安装在载体上的惯性元件测得相对惯性空间的加速度和角加速度是沿载体轴的分量,将这些分量经过一个坐标转换方向余弦阵,可以转换到要求的计算机坐标系内的分量。如果这个矩阵可以描述载体和地理坐标系之间的关系,那么载体坐标系测得的相对惯性空间的加速度和角速度,经过转换后便可得到沿地理坐标系的加速度和角速度分量,有了已知方位的加速度和角速度分量之后,导航计算机便可根据相应的力学方程解出要求的导航和姿态参数来。
捷联惯导系统和平台式惯导系统一样,能精确提供载体的姿态、地速、经纬度等导航参数。但平台式惯导系统结构较复杂、可靠性较低、故障间隔时间较短、造价较高,为可靠起见,通常在一个运载体上要配用两套惯导装置,这就增加了维修和购置费用。在捷联惯导系统中,由于计算机中存储的方向余弦解析参考系取代了平台系统以物理形式实现的参考系,因此,捷联惯导系统有以下独特优点。
(1)去掉了复杂的平台机械系统,系统结构极为简单,减小了系统的体积和重量,同时降低了成本,简化了维修,提高了可靠性。
(2)无常用的机械平台,缩短了整个系统的启动准备时间,也消除了与平台系统有关的误差。
(3)无框架锁定系统,允许全方位(全姿态)工作。
(4)除能提供平台式系统所能提供的所有参数外,还可以提供沿弹体三个轴的速度和加速度信息。
但是,由于在捷联惯导系统中,惯性元件与载体直接固连,其工作环境恶劣,对惯性元件及机(弹)载计算机等部件也提出了较高的要求。
(1)要求加速度表在宽动态范围内具有高性能、高可靠性,且能数字输出。
(2)因为要保证大攻角下的计算精度,对计算机的速度和容量都提出了较高的要求。
发展趋势
进入20世纪80~90年代,在航天飞机、宇宙飞船、卫星等民用领域及在各种战略、战术导弹、军用飞机、反潜武器、作战舰艇等军事领域开始采用动力调谐式陀螺、激光陀螺和光纤式陀螺的捷联惯导系统,尤其是激光陀螺和光纤式陀螺是捷联惯导系统的理想器件。激光陀螺具有角速率动态范围宽、对加速度和震动不敏感、不需温控、启动时间特别短和可靠性高等优点。激光陀螺惯导系统已在波音757/767、A310民机以及F-20战斗机上试用,精度达到1.85km/h的量级。20世纪90年代,激光陀螺惯导系统估计占到全部惯导系统的一半以上,其价格与普通惯导系统差不多,但由于增加了平均故障间隔时间,因而其寿命期费用只有普通惯导系统的15%~20%。光纤陀螺实际上是激光陀螺中的一种,其原理与环型激光陀螺相同,克服了因激光陀螺闭锁带来的负效应,具有检测灵敏度和分辨率极高(可达10-7rad/s)、启动时间极短(原理上可瞬间启动)、动态范围极宽、结构简单、零部件少体积小、造价低、可靠性高等优点。采用光纤陀螺的捷联航姿系统已用于战斗机的机载武器系统中及波音777飞机上。波音777由于采用了光纤陀螺的捷联惯导系统,其平均故障间隔时间可高达20000h。采用光纤陀螺的捷联惯导系统被认为是一种极有发展前途的导航系统。

捷联惯导系统
尽管捷联惯导系统不能避免惯性器件的固有缺点,但由于它具有诸多优点,因此,目前捷联惯导系统在各类民用的航天飞行器、运载火箭、客/货机及军事领域的各类军用飞机、战术导弹等武器系统上都已被广泛采用。随着航空航天技术的发展及新型惯性器件的关键技术的陆续突破进而被大量应用,捷联惯导系统的可靠性、精度将会更高,成本将更低,同时,随着机(弹)载计算机容量和处理速度的提高,许多惯性器件的误差技术也可走向实用,它可进一步提高捷联惯导系统的精度。此外,随着以绕飞行体轴旋转角增量为输出的新型高精度捷联式陀螺的出现,用以描述刚体姿态运动的数学方法也有了新的发展,将以经典的欧拉角表示法向四元素表示法发展。
不管惯性器件的精度多高,由于陀螺漂移和加速度计的误差随时间逐渐积累(这也是纯惯导系统的主要误差源之一,它对位置误差增长的影响是时间的三次方函数),惯导系统长时间运行必将导致客观的积累误差,因此,目前人们在不断探索提高自主式惯导系统的精度外,还在寻求引入外部信息,形成组合式导航系统,这是弥补惯导系统不足的一个重要措施。
组合导航系统通常以惯导系统作为主导航系统,而将其他导航定位误差不随时间积累的导航系统如无线电导航、天文导航、地形匹配导航、GPS等作为辅助导航系统,应用卡尔曼滤波技术,将辅助信息作为观测量,对组合系统的状态变量进行最优估计,以获得高精度的导航信号。这样,既保持了纯惯导系统的自主性,又防止了导航定位误差随时间积累。组合导航系统不仅在民用上而且在军事上均具有重要意义。

捷联惯导系统
随着GPS的普及,SINS/GPS组合导航系统显示出巨大的发展潜力。该组合导航系统由GPS提供三维位置、三维速度和精确的时间信息,系统的核心是卡尔曼滤波器,它是在线性最小方差下的最优估计。美国海军在海湾战争发射的"斯拉姆"导弹的惯导系统采用了GPS技术,其命中精度达10~15m之内;美国于20世纪80年代研制的已在"三叉戟"核潜艇上部署的射程达11110km的"三叉戟2"D-5战略导弹,采用了CNS/INS(天文导航系统/惯性导航系统)组合导航系统,其导弹落点圆周概率(CEP)小于185m。
军事应用
目前,捷联惯导系统已在军民领域被广泛应用,本文仅介绍其在部分飞航式导弹/炸弹上的应用(见表1)。对于飞航式战术地地导弹,由于其全程均在稠密大气层内飞行,且射程远,飞行时间长,容易受到大气干扰的影响,因此,采用捷联惯导系统是唯一可选的制导方式;对于中远程的空空导弹,因导弹的发射距离远,具有攻击多目标的能力,捷联惯导系统也是比较理想的中制导方式;中远程地空导弹的制导方式一般为初始制导+中制导+末制导,其中中制导一般采用具有捷联惯导系统的组合导航系统;各类反舰导弹采用捷联惯导系统也可简化降低成本,提高性能价格比。
参考资料
1.捷联惯导总结--初始对准,位置标定,INS姿态更新,GPS/INS组合_赤豆几维-CSDN博客 · CSDN社区(引用日期:2021-11-09)
捷联惯导系统相关的文章

程英,金庸小说《神雕侠侣》中的人物,本是江南陆家庄大小姐陆无双的表姐,陆家庄被李莫愁灭门后,程英与陆无双逃出陆家庄,程英被黄药师所救出,后被其收为关门弟子。程英长相脸色晶莹,肤光如雪,鹅蛋脸儿上有一个小小酒窝,微现腼腆,程英性格温柔婉娈,善解人意,是《神雕侠侣》中极具魅力的女性之一。
科威特战争于1990年8月爆发,是伊拉克对科威特发动侵略战争,其意图将科威特变为伊拉克的第十九个省。五个月后,美国发动对伊拉克的战争,伊拉克不但被迫放弃了科威特,本国各项发展也遭到巨大破坏。
解忧公主(前119年—前49年),名刘解忧,西汉彭城人,出身皇族,西汉楚王刘戊之孙女,后加封为公主,远嫁乌孙,为了维护汉朝和乌孙的和亲联盟,在乌孙生活近五十余年。
章和是东汉章帝刘炟的第三个年号,也是他的最后一个年号,共计18个月。该年号在历史上被用作几个政权的年号。据《资治通鉴》记载,元和四年七月廿七壬戌(87年9月12日),章和正式改元。在章和二年二月,汉和帝即位时沿用该年号,但次年正月初一(89年1月30日)改元永元。

卡拉奇(乌尔都语:كراچى,信德语:ڪراچي),是巴基斯坦第一大城市,位于巴基斯坦南部海岸、印度河三角洲西北部,南濒临阿拉伯海,居莱里河与玛利尔河之间的平原上。人口约2000万,面积3527平方公里,其中城区面积1821平方公里。[4]卡拉奇属于亚热带沙漠气候,一年大部分时间高温少雨,炎热难耐,冬季(1、2月)平均最低气温13℃,夏季(5、6月)平均最高气温34℃。雨量稀少,年平均降水量仅200毫米。[4]2019年12月26日,位列2019年全球城市500强榜单第117名。

尚可名片
这家伙太懒了,什么都没写!
作者
